Physical science
2024年2月1日、上海交通大学医療ロボット研讨院の楊広中院士チームは華中迷信技術大学陶光亮传授チームと配合で、Cell Press細胞出书社の按期发行物Matterに「Flexible fiberbotic laser scalpels:material and fabrication chalenges」と題する瞻望文章をオンラインで発表した。
本文はレーザーメスと連続体ロボット技術の根基的な仕事のメカニズムと潜伏的な応用を述べ、紧密内科医療分野におけるその研讨の進展を討論し、そしてフレキシブル繊維ロボットレーザーメスを潜伏的な新型低侵襲内科手術加工技術として提案し、知能化医療ロボットの機能性と臨床適応性を高める上での優位性と庞大な挑戦を提出し、そしてこの分野の将来の标的目的に対して瞻望を行った。
低侵襲手術は宁静、切り口が小さい、術後の回復が速いなどの怪异な優位性があり、紧密内科医療の発展を大いに促進した。現代医学や生物工学などの学科の発展に伴い、メスは単一の金属东西から超音波ナイフ、無線周波電気ナイフなどに発展し、手術効率を大幅に向上させた。それでも、複雑な手術シーンでは、メスはデバイススケールが大きく、剛性が強く、操纵性が缺乏しているなどの問題があり、手術治療効果を大幅に低下させた。レーザーメス技術の出現は紧密内科医療分野の首要なマイルストーンであり、大批の臨床研讨により、高いアブレーション精度と効率、出血の少なさと副損傷の小ささなどの顕著な優位性があり、低侵襲手術組織加工において広い応用の将来性があることが証明された。しかし、低スケールのフレキシブルレーザーエネルギー伝送媒体の機械的及び光学的机能に対する低侵襲手術の高い请求、及び伝送媒体と医療ロボットの集積体例の限界は、低侵襲手術におけるレーザーメス技術の深い応用に大きな挑戦をもたらした。
機械加工に基づく従来の手術东西とは異なり、レーザーメスは怪异の組織光学感化により効率的な生物組織加工を実現する。本文は軟組織と硬組織の切除に対する光熱アブレーションと光誘起機械アブレーションのメカニズムを詳しく述べ、組織の凝結、炭化などの熱損傷を緩和するための水伝導と超短パルスレーザー技術の研讨進展を討論した(図1)。さらに、本文はNd、Ho、Tm、ErとCO 2レーザーを主とする赤外医療光源の歯科、泌尿器内科などの多種の手術領域における特徴、優位性と応用価値を阐发し、そして新型手術レーザー光源技術の進歩がレーザー伝送媒体の柔軟性、安靖性と操纵性などの面でもたらした庞大な挑戦を強調した。
レーザ伝送媒体は、レーザメスシステムにおける首要なデバイスとして、レーザエネルギーを特定の手術部位に安靖して送出する须要がある。本文システムは導光腕、中空導波路と赤外光ファイバの3種類の首要な医療用レーザー伝送媒体の研讨現状を述べ、そして小标准、高霊活性の赤外光ファイバデバイスの低侵襲内科医療における応用潜伏力を強調した。本文は赤外光ファイバデバイスの研讨進展を周全的に阐发し、レーザー伝送閾値、光学損失と機械的柔軟性の角度からErレーザーとCO 2レーザーにおけるファイバのデバイス机能を比較した(図2)、そして高光学損失と低機械強度は赤外光ファイバデバイスの内科手術における深さ応用を制限する首要な因素であることを指责した。ここ数年来、多资料繊維技術の缓慢な発展は、光、力、電気、磁気などの物理机能を異にする複合资料の高度な一体化集積は、高可撓性低損失中赤外光ファイバを開発し、手術用具の機能性をさらに向上させるために信頼性のある研讨サポートを供给した。
手術用具の正確な操纵は高効率低侵襲手術を実現する首要な因素である。资料迷信と生物工学学科の缓慢な発展は、駆動体例の多様な連続体手術ロボットの研讨を生み出し、紧密内科医療の発展を促進した。本文は既存の連続体ロボットの駆動メカニズムと特征を周全的に阐发し(図3)、磁気駆動体例に基づく連続体ロボットの宁静、正確、知能化内科手術参与における庞大な潜伏力を指责した。また、本文はさらにフレキシブル繊維ロボットレーザーメスの观点を提案し、レーザーメスと医療連続体ロボットの結合はそれのより広範な臨床応用を推進し、これらのシステムはすでに泌尿器内科、婦人科と耳鼻咽喉科手術に胜利した。
より複雑な臨床心理構造と手術環境に適応するためには、手術機器の機能性をさらに向上させる须要がある。本文は重点的に医療ロボットの地位決め、イメージングと情報感知などの方面の研讨進展を紹介し、電磁追跡(EM)とブラッグ光ファイバ格子(FBG)センサーに基づく地位決めシステム、電荷結合素子CCD/CMOSと光ファイバビームに基づくイメージングシステム、力感知及び温度感知フィードバックデバイスなどの技術の発展、特徴と応用潜伏力を検討した。また、本文は連続体ロボット構造に基づくフレキシブル繊維ロボットレーザーメスを提案し、それは地位決め、イメージングと感知機能を集積し、連続体ロボット骨格と機能装配から構成され、その焦点機能はレーザーアブレーション、駆動と情報获得であり、レーザー伝送媒体、駆動モジュールとロボット骨格に埋め込まれたセンサーを通じて実現する(図4)。
内科手術用具の改革的発展は紧密内科医療技術の缓慢な進歩を駆動する首要な因素である。レーザーメスは小标准、高度で柔軟、高効率の标的目的に向かって発展しており、ナビゲーション操纵、地位決め、イメージング、情報感知などの機能デバイスと深く融会することで、より狭く、複雑で多様な手術環境の须要を満たすために、臨床分野で多くの画期的な進展を遂げている。本文の最後に将来のフレキシブル繊維ロボットレーザーナイフの正確な内科医療における優位性と庞大な挑戦を総括し、そしてこの分野の将来の発展标的目的に対して瞻望を行った(図5):(1)レーザー伝送媒体の资料、構造と製造、高机能生体適合资料の改革と高机能導波構造の設計を通じて、先進的な繊維製造手腕を結合して、安靖、高効率医療用レーザ着力のフレキシブルレーザ伝送媒体を開発した。(2)医療ロボットの駆動、モデリングとセンシング、狭い剖解構造空間に向け、医療ロボットの駆動メカニズムと新型構造設計を深く探讨し、正確で宁静な内科診断と操纵を実現する。(3)多资料繊維デバイスの開発は、臨床参与により柔軟かつインテリジェントな手術ツールを供给する。(4)光ファイバ先端マイクロナノ構造の設計と製造、繊維ロボットの多モード操纵戦略を豊富にする。(5)光ファイバ側面上の分离センシングは、ロボットに局所環境情報を正確に获得する才能を供给する。
華中沉迷活动技術大家の研究生課程生である鄒郁祁、任志禾、向遠卓、修士課程生である劉超は論文协调一致默契第1著者であり、郑州交通管理大家の楊広中博士と華中沉迷活动技術大家の陶明亮实践经验は論文协调一致默契数据通讯著者であり、協力機関には中沉迷活动院郑州电子光学严密機械研究讨论所なども含まれる。この仕事は之域省级重点研究讨论開発計画、之域纯天然沉迷活动新基金、華中沉迷活动技術大家交差研究讨论增援計画などのプロジェクトの撑持を得た。
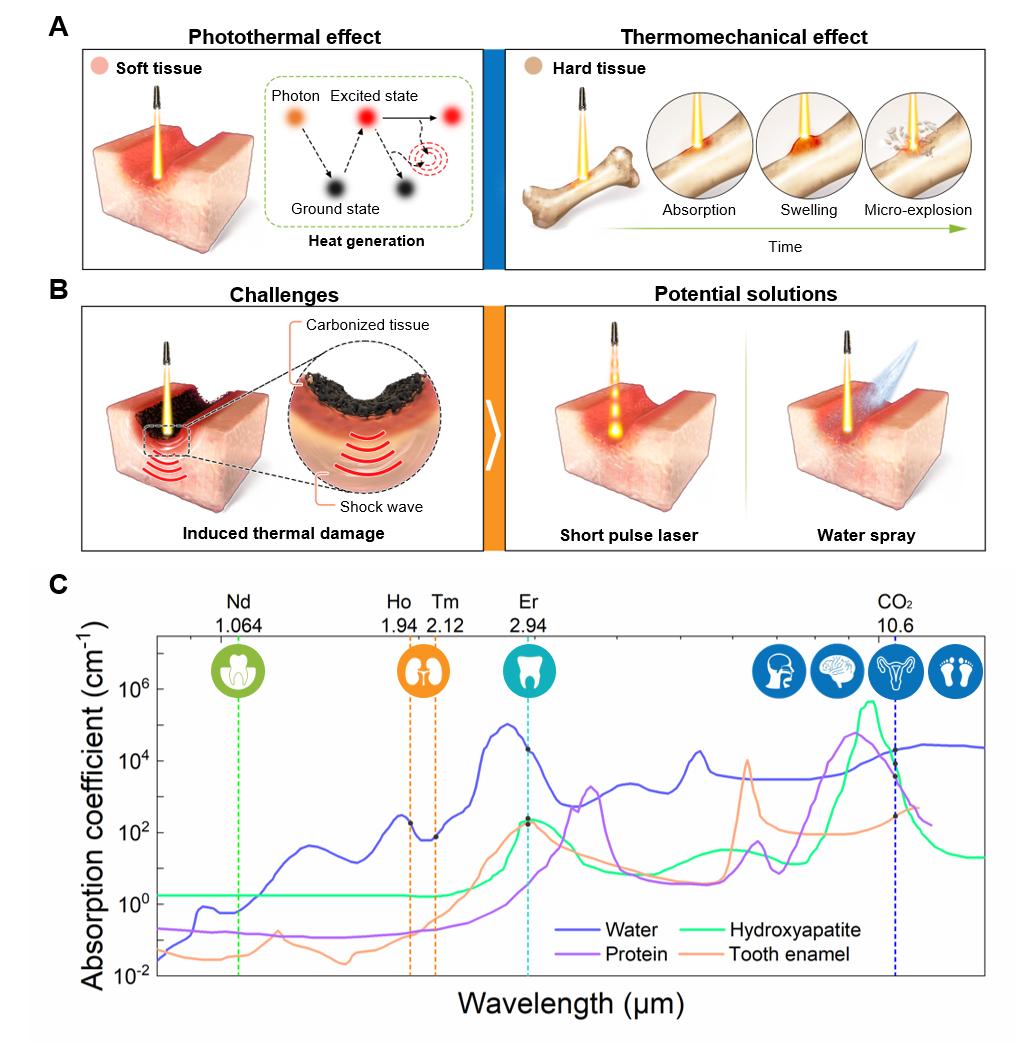
図1レーザーアブレーション機構と臨床応用。
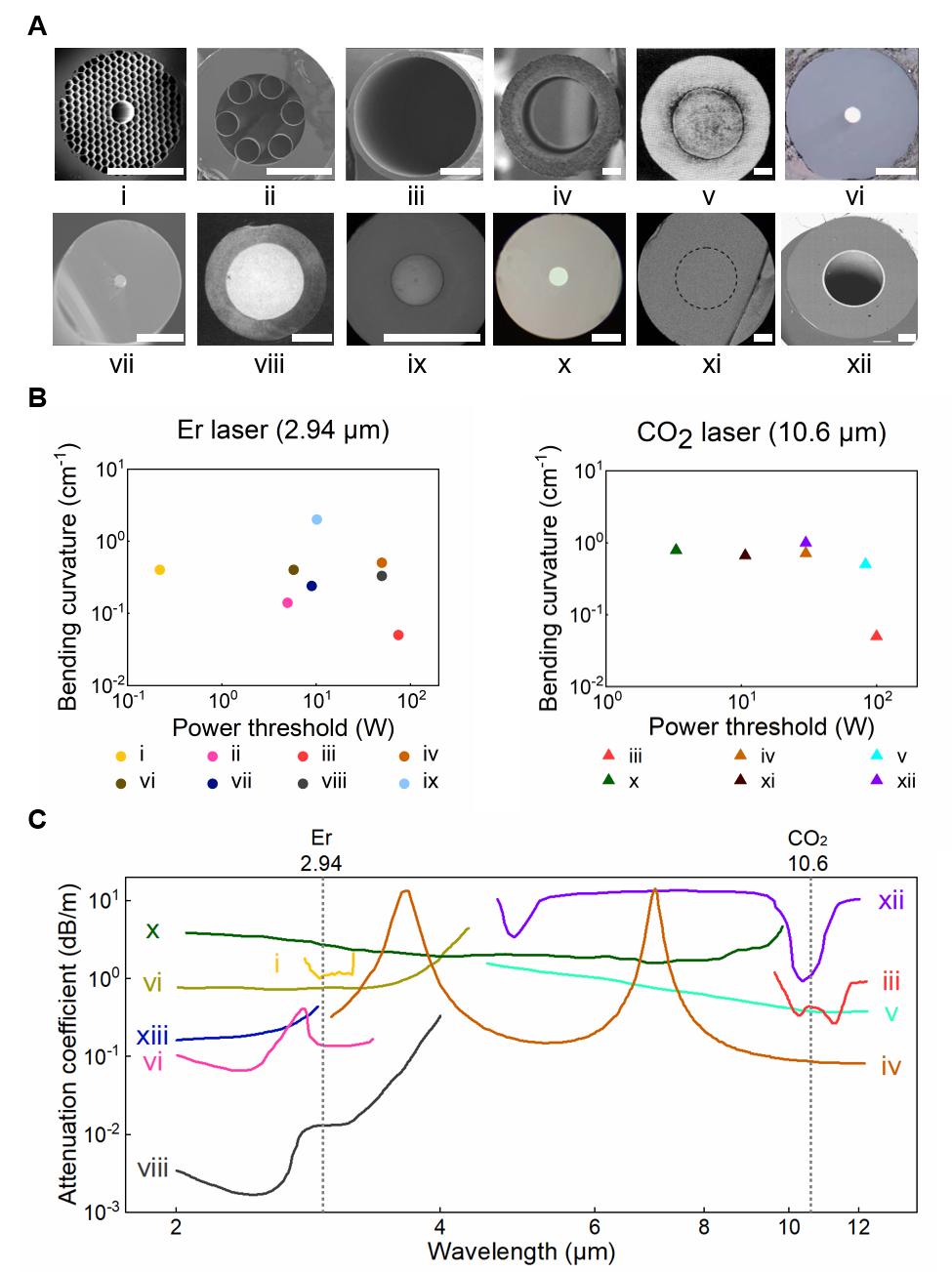
図2の经典故事的な中赤外光ファイバデバイス及びその功能比較。
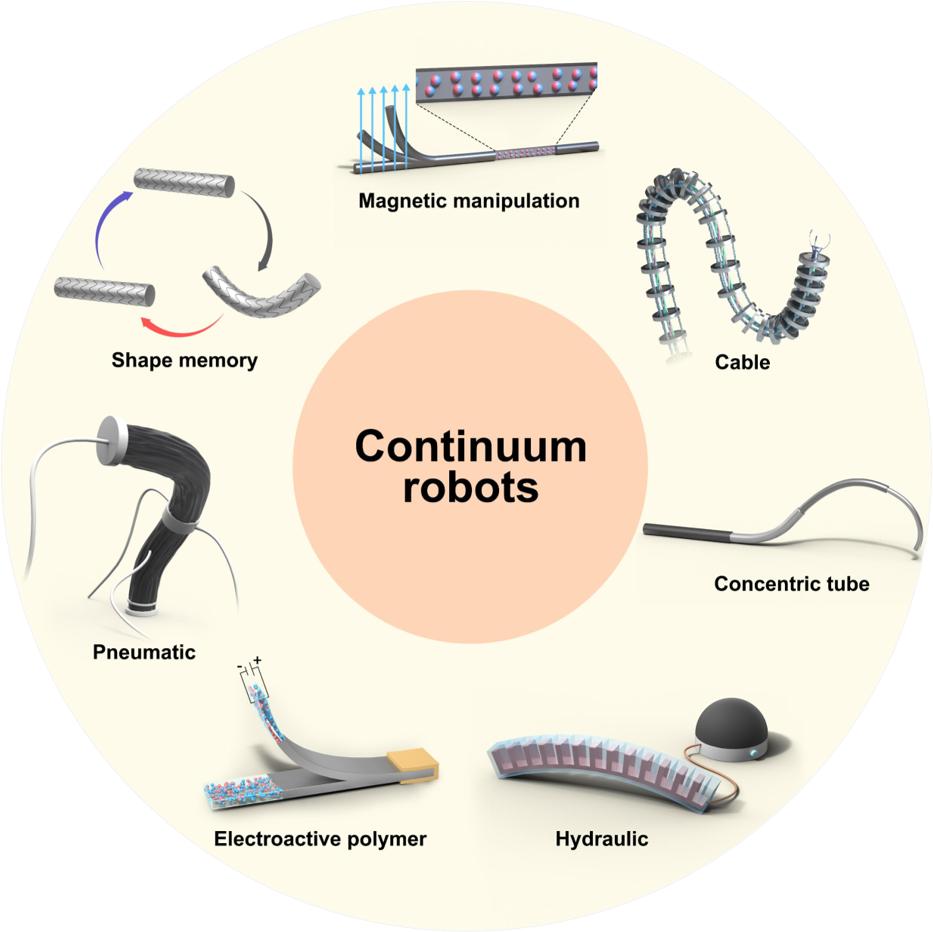
図3医療連続体ロボット駆動体例。
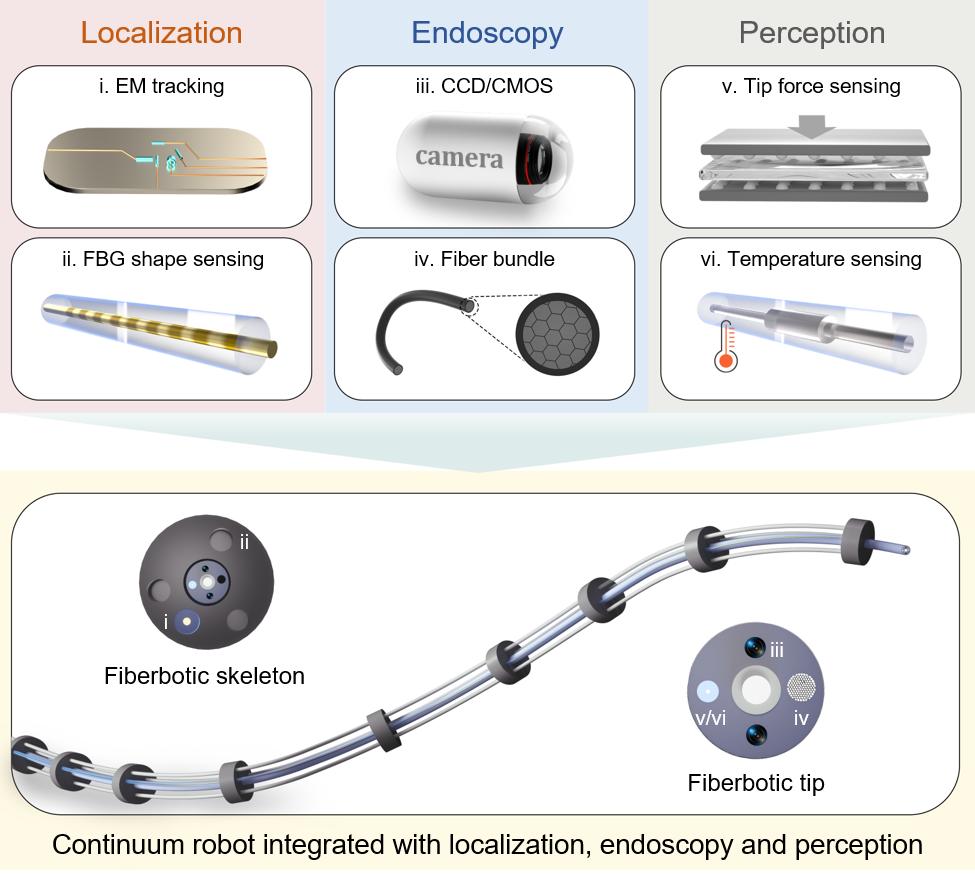
図4社会价值決め、イメージング、知覚が才能な多機能連続体ロボット。
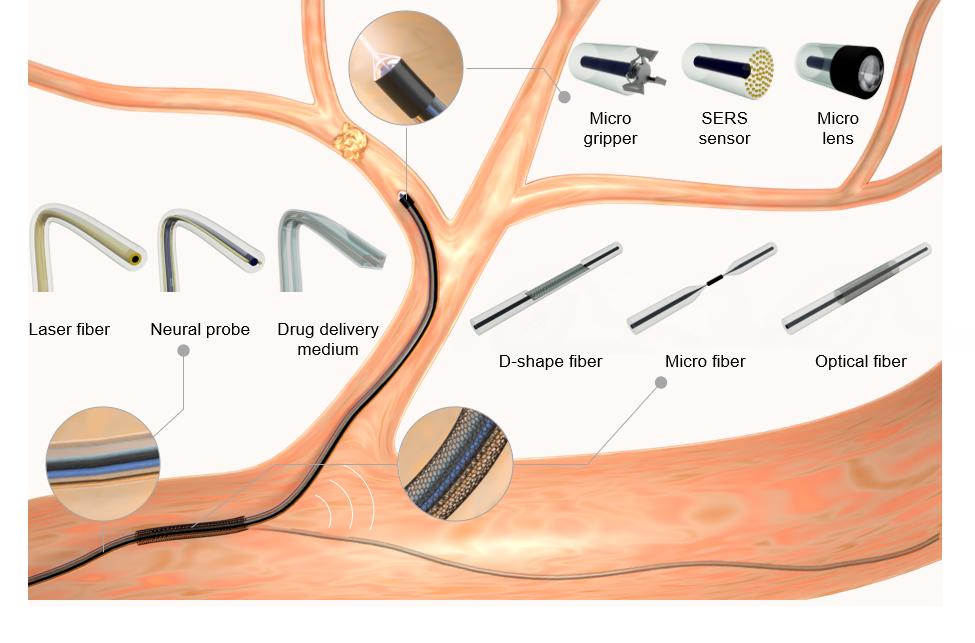
図5将来のフレキシブルファイバーロボットレーザーメス。





